BFS(广度优先搜索)
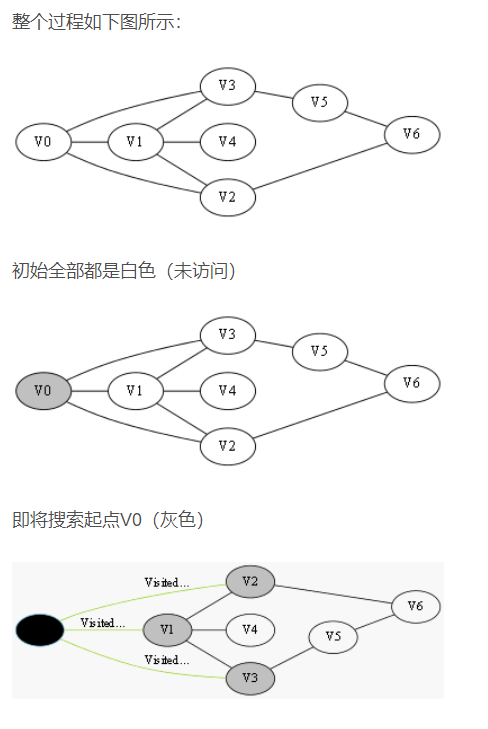
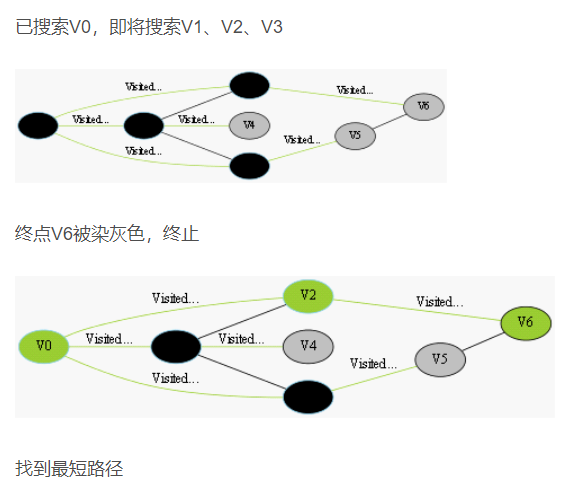
我们采用示例图来说明这个过程,在搜索的过程中,初始所有节点是白色(代表了所有点都还没开始搜索),把起点V0标志成灰色(表示即将辐射V0),下一步搜索的时候,我们把所有的灰色节点访问一次,然后将其变成黑色(表示已经被辐射过了),进而再将他们所能到达的节点标志成灰色(因为那些节点是下一步搜索的目标点了),但是这里有个判断,就像刚刚的例子,当访问到V1节点的时候,它的下一个节点应该是V0和V4,但是V0已经在前面被染成黑色了,所以不会将它染灰色。这样持续下去,直到目标节点V6被染灰色,说明了下一步就到终点了,没必要再搜索(染色)其他节点了,此时可以结束搜索了,整个搜索就结束了。然后根据搜索过程,反过来把最短路径找出来,下图中把最终路径上的节点标志成绿色。
为了便于进行搜索,要设置一个表存储所有的结点。由于在广度优先搜索算法中,要满足先生成的结点先扩展的原则,所以存储结点的表一般采用队列这种数据结构。
在编写程序时,可用数组q模拟队列。front和rear分别表示队头指针和队尾指针,初始时front=rear=0。
元素x入队操作为 q[rear++]=x;
元素x出队操作为 x =q[front++];
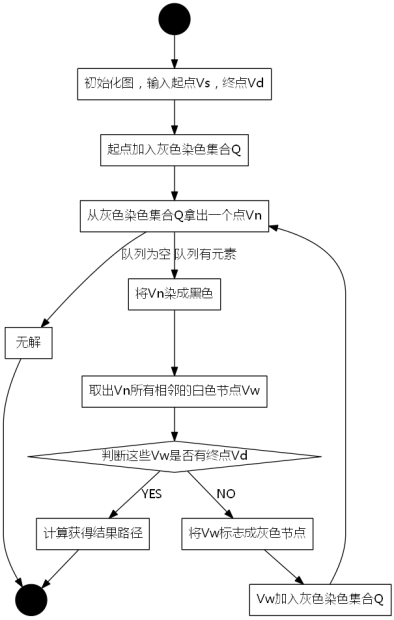
广度优先搜索算法的搜索步骤一般是:
(1)从队列头取出一个结点,检查它按照扩展规则是否能够扩展,如果能则产生一个新结点。
(2)检查新生成的结点,看它是否已在队列中存在,如果新结点已经在队列中出现过,就放弃这个结点,然后回到第(1)步。否则,如果新结点未曾在队列中出现过,则将它加入到队列尾。
(3)检查新结点是否目标结点。如果新结点是目标结点,则搜索成功,程序结束;若新结点不是目标结点,则回到第(1)步,再从队列头取出结点进行扩展。
最终可能产生两种结果:找到目标结点,或扩展完所有结点而没有找到目标结点。
对于广度优先搜索算法来说,问题不同则状态结点的结构和结点扩展规则是不同的,但搜索的策略是相同的。广度优先搜索算法的框架一般如下:
1 | void BFS() |
DFS(深度优先搜索)
深度优先搜索(缩写DFS)有点类似广度优先搜索,也是对一个连通图进行遍历的算法。它的思想是从一个顶点V0开始,沿着一条路一直走到底,如果发现不能到达目标解,那就返回到上一个节点,然后从另一条路开始走到底,这种尽量往深处走的概念即是深度优先的概念。下面是dfs的框架代码
1 | /** |
再贴一段DFS的伪码
1 | int check(参数) |
深度与广度的比较
我们假设一个节点衍生出来的相邻节点平均的个数是N个,那么当起点开始搜索的时候,队列有一个节点,当起点拿出来后,把它相邻的节点放进去,那么队列就有N个节点,当下一层的搜索中再加入元素到队列的时候,节点数达到了N^2,你可以想想,一旦N是一个比较大的数的时候,这个树的层次又比较深,那这个队列就得需要很大的内存空间了。
于是广度优先搜索的缺点出来了:在树的层次较深并且子节点数较多的情况下,消耗内存十分严重。广度优先搜索适用于节点的子节点数量不多,并且树的层次不会太深的情况。
那么深度优先就可以克服这个缺点,因为每次搜的过程,每一层只需维护一个节点。但回过头想想,广度优先能够找到最短路径,那深度优先能否找到呢?深度优先的方法是一条路走到黑,那显然无法知道这条路是不是最短的,所以你还得继续走别的路去判断是否是最短路?
于是深度优先搜索的缺点也出来了:难以寻找最优解,仅仅只能寻找有解。其优点就是内存消耗小,克服了刚刚说的广度优先搜索的缺点。